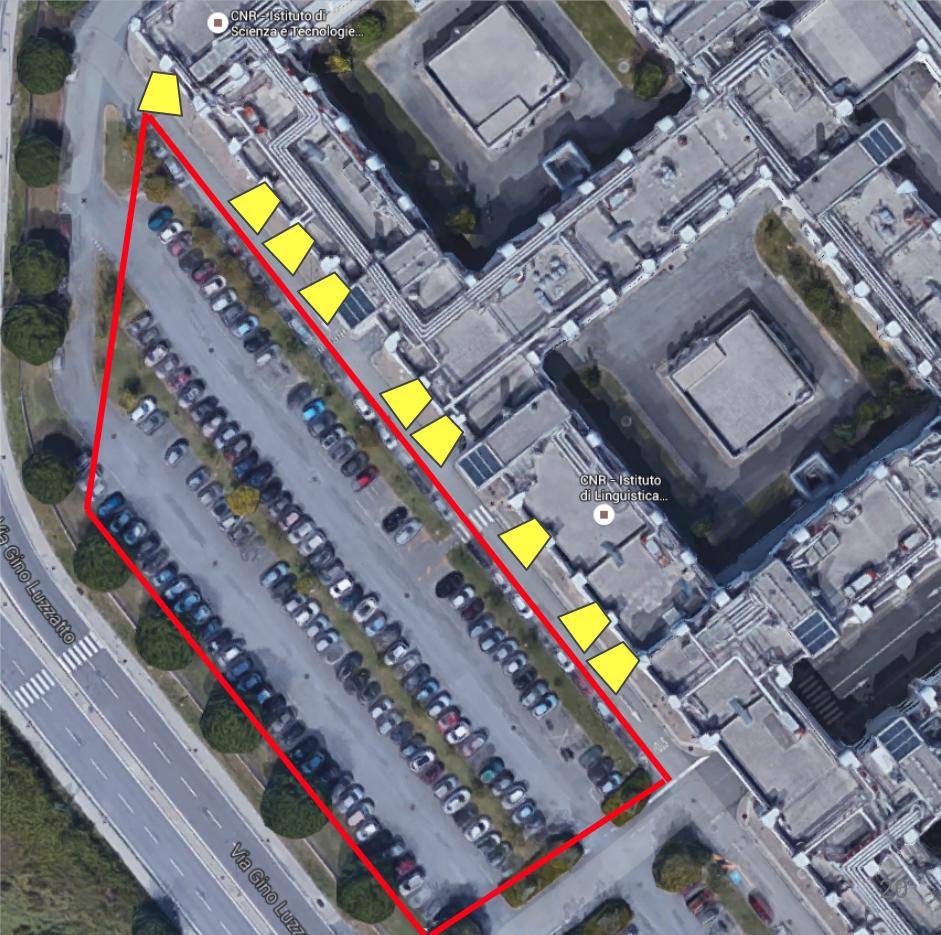
CNRPark+EXT is a dataset for visual occupancy detection of parking lots of roughly 150,000 labeled images (patches) of vacant and occupied parking spaces, built on a parking lot of 164 parking spaces.
CNRPark+EXT extends CNRPark, a preliminary dataset composed by 12,000 images collected in different days of July 2015 from 2 cameras.
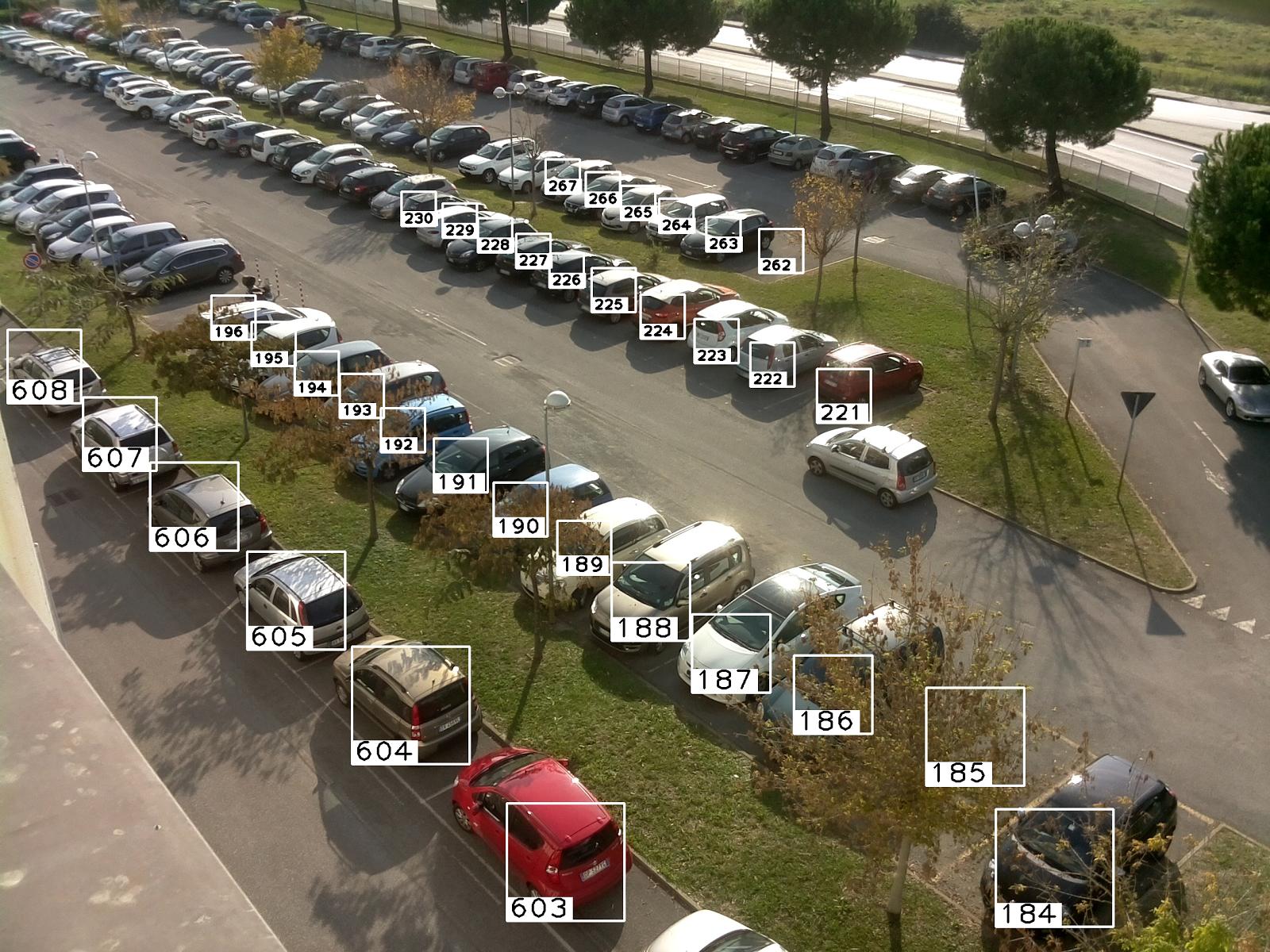
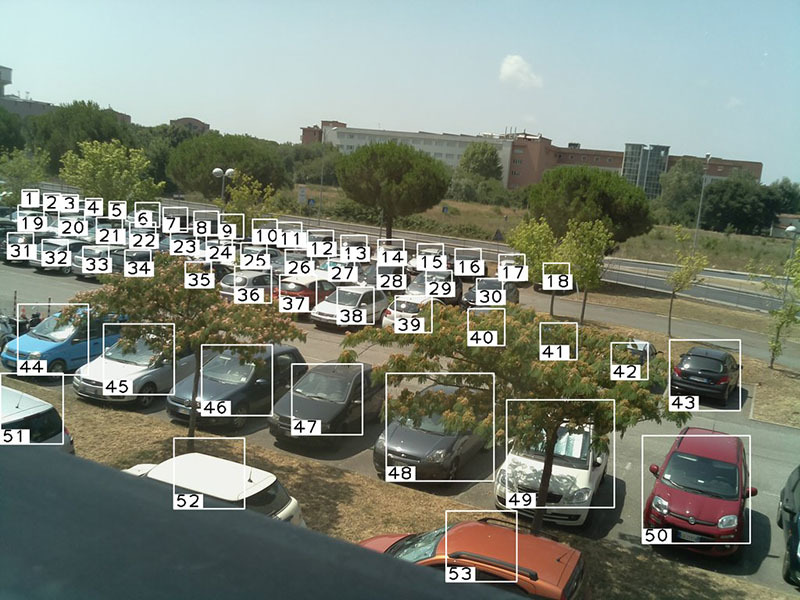
The additional subset, called CNR-EXT, is composed by images collected from November 2015 to February 2016 under various weather conditions by 9 cameras with different perspectives and angles of view. CNR-EXT captures different situations of light conditions, and it includes partial occlusion patterns due to obstacles (trees, lampposts, other cars) and partial or global shadowed cars.
The video shows the visual occupancy detection system based deployed at the CNR Research Area in Pisa, Italy. Predictions are made by the cameras, which run an efficient convolutional neural network classifier trained with CNRPark+EXT.
CNRPark+EXT is composed by two subsets collected during our research. In the following, the details of both subsets are reported, together with a preview of the data collected.
| Subset | Cams | Collection Period | Weather | Frames | Patches |
|---|---|---|---|---|---|
| CNRPark | 2 | July 2015 (2 days) | 242 | 12,584 | |
| CNR-EXT | 9 | Nov. 2015 - Feb. 2016 (23 days) | 4,081 | 144,965 |




![]()
![]()
![]()
![]()


Dataset Download
You can download CNRPark+EXT using the following links:
-
CNRPark+EXT.csv (18.1 MB)
CSV collecting metadata for each patch of both CNRPark and CNR-EXT datasets
-
CNRPark-Patches-150x150.zip (36.6 MB)
segmented images (patches) of parking spaces belonging to the CNRPark preliminary subset.
Files follow this organization:<CAMERA>/<CLASS>/YYYYMMDD_HHMM_<SLOT_ID>.jpg, where:<CAMERA>can beAorB,<CLASS>can befreeorbusy,YYYYMMDD_HHMMis the zero-padded 24-hour capture datetime,<SLOT_ID>is a local ID given to the slot for that particular camera
E.g:
A/busy/20150703_1425_32.jpg -
CNR-EXT-Patches-150x150.zip (449.5 MB)
segmented images (patches) of parking spaces belonging to the CNR-EXT subset.
Files follow this organization:
PATCHES/<WEATHER>/<CAPTURE_DATE>/camera<CAM_ID>/<W_ID>_<CAPTURE_DATE>_<CAPTURE_TIME>_C0<CAM_ID>_<SLOT_ID>.jpg,
where:<WEATHER>can beSUNNY,OVERCASTorRAINY,<CAPTURE_DATE>is the zero-paddedYYYY-MM-DDformatted capture date,<CAM_ID>is the number of the camera, ranging1-9,<W_ID>is a weather identifier, that can beS,OorR,<CAPTURE_TIME>is the zero-padded 24-hourHH.MMformatted capture time,<SLOT_ID>is a global ID given to the monitored slot; this can be used to uniquely identify a slot in the CNR-EXT dataset.
E.g:
PATCHES/SUNNY/2015-11-22/camera6/S_2015-11-22_09.47_C06_205.jpgThe
LABELSfolder contains a list file for each split of the dataset used in our experiments. Each line in list files follow this format:<IMAGE_PATH> <LABEL>, where:<IMAGE_PATH>is the path to a slot image,<LABEL>is0forfree,1forbusy.
-
CNR-EXT_FULL_IMAGE_1000x750.tar (1.1 GB)
full frames of the cameras belonging to the CNR-EXT subset. Images have been downsampled from 2592x1944 to 1000x750 due to privacy issues.
Files follow this organization:
FULL_IMAGE_1000x750/<WEATHER>/<CAPTURE_DATE>/camera<CAM_ID>/<CAPTURE_DATE>_<CAPTURE_TIME>.jpg,
where:<WEATHER>can beSUNNY,OVERCASTorRAINY,<CAPTURE_DATE>is the zero-paddedYYYY-MM-DDformatted capture date,<CAM_ID>is the number of the camera, ranging1-9,<CAPTURE_TIME>is the zero-padded 24-hourHHMMformatted capture time.
The archive contains also 9 CSV files (one per camera) containing the bounding boxes of each parking space with which patches have been segmented. Pixel coordinates of the bouding boxes refer to the 2592x1944 version of the image and need to be rescaled to match the 1000x750 version.
-
splits.zip (27.2 MB)
all the splits used in our experiments. Those splits combine our datasets and also third-party datasets (such as PKLot).
Trained Models
Here you can download the trained models used in our experiments. Models have been trained with BVLC Caffe.
- CNRPark+EXT_Trained_Models_mAlexNet.zip (1.7 MB)
trained models used in the experiments presented in [1]. This archive contains only models with mAlexNet architecture.
- CNRPark+EXT_Trained_Models_AlexNet.zip (1.7 GB)
trained models used in the experiments presented in [1]. This archive contains only models with AlexNet architecture.
- CNRPark-Trained-Models.zip (3.2 MB)
contains the trained models used in the experiments presented in [2].
The code for reproducing the experiments is available on GitHub: https://github.com/fabiocarrara/deep-parking
Papers













[1] Deep learning for decentralized parking lot occupancy detection
G Amato, F Carrara, F Falchi, C Gennaro, C Meghini, C Vairo
Expert Systems with Applications 72, 327-334
A smart camera is a vision system capable of extracting application-specific information from the captured images. The paper proposes a decentralized and efficient solution for visual parking lot occupancy detection based on a deep Convolutional Neural Network (CNN) specifically designed for smart cameras. This solution is compared with state-of-the-art approaches using two visual datasets: PKLot, already existing in literature, and CNRPark+EXT. The former is an existing dataset, that allowed us to exhaustively compare with previous works. The latter dataset has been created in the context of this research, accumulating data across various seasons of the year, to test our approach in particularly challenging situations, exhibiting occlusions, and diverse and difficult viewpoints. This dataset is public available to the scientific community and is another contribution of our research. Our experiments show that our solution outperforms and generalizes the best performing approaches on both datasets. The performance of our proposed CNN architecture on the parking lot occupancy detection task, is comparable to the well-known AlexNet, which is three orders of magnitude larger.






[2] Car parking occupancy detection using smart camera networks and deep learning
G Amato, F Carrara, F Falchi, C Gennaro, C Vairo
IEEE Symposium on Computers and Communication (ISCC) 2016, 1212-1217
This paper presents an approach for real-time car parking occupancy detection that uses a Convolutional Neural Network (CNN) classifier running on-board of a smart camera with limited resources. Experiments show that our technique is very effective and robust to light condition changes, presence of shadows, and partial occlusions. The detection is reliable, even when tests are performed using images captured from a viewpoint different than the viewpoint used for training. In addition, it also demonstrates its robustness when training and tests are executed on different parking lots. We have tested and compared our solution against state of the art techniques, using a reference benchmark for parking occupancy detection. We have also produced and made publicly available an additional dataset that contains images of the parking lot taken from different viewpoints and in different days with different light conditions. The dataset captures occlusion and shadows that might disturb the classification of the parking spaces status.
@article{amato2017deep,
title={Deep learning for decentralized parking lot occupancy detection},
author={Amato, Giuseppe and Carrara, Fabio and Falchi, Fabrizio and Gennaro, Claudio and Meghini, Carlo and Vairo, Claudio},
journal={Expert Systems with Applications},
volume={72},
pages={327--334},
year={2017},
publisher={Pergamon}
}
@inproceedings{amato2016car,
title={Car parking occupancy detection using smart camera networks and deep learning},
author={Amato, Giuseppe and Carrara, Fabio and Falchi, Fabrizio and Gennaro, Claudio and Vairo, Claudio},
booktitle={Computers and Communication (ISCC), 2016 IEEE Symposium on},
pages={1212--1217},
year={2016},
organization={IEEE}
}